
Ebyte LoRa E32 per Arduino, esp32 o esp8266: trasmissione fissa – Parte 4
Ora capiremo i vari tipi di trasmissione del nostro dispositivo E32 UART LoRa basato sui popolari moduli wireless SX1276 / SX1278.

Puoi trovare il modulo qui AliExpress (433MHz 5Km) - AliExpress (433MHz 8Km) - AliExpress (433MHz 16Km) - AliExpress (868MHz 915MHz 5.5Km) - AliExpress (868MHz 915MHz 8Km)
Nella prima parte ho usato una trasmissione trasparente, quindi inviamo a tutti e riceviamo da tutti coloro che hanno il nostro stesso indirizzo e canale.
Ma non è uno scenario standard, normalmente vogliamo inviare a un punto specifico e ricevere risposta.
Se hai problemi, ad esempio ti si freeze il dispositivo è preferibile mettere una restistenza di pull-up da 4.7k o meglio collegare il pin AUX al dispositivo.
Normal mode
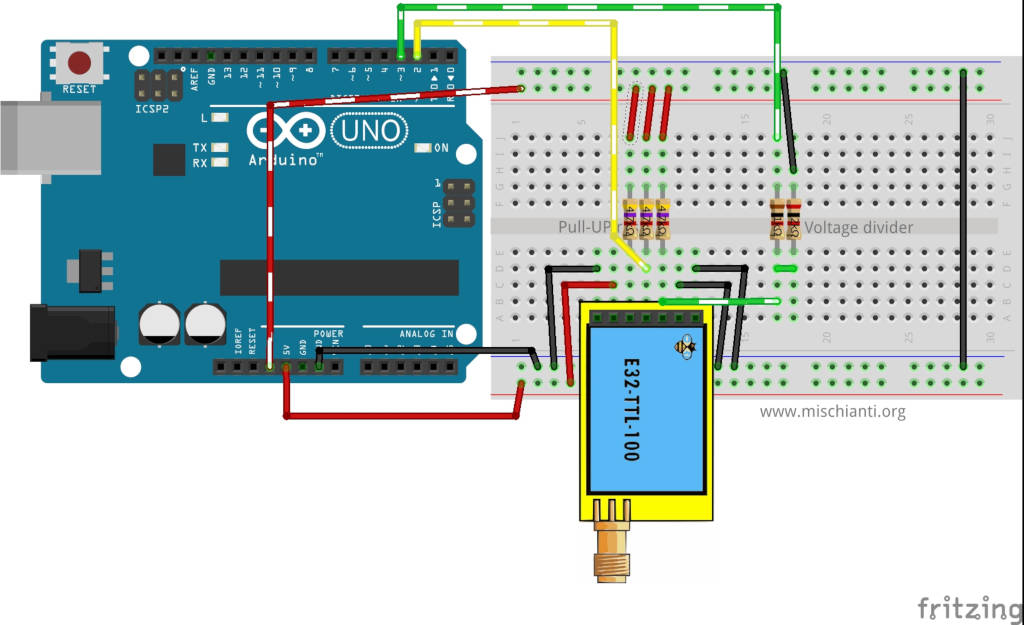
Per la trasmissione normale è necessario impostare M0 e M1 su LOW ed è meglio se si collega il pin AUX per avere una sincronizzazione migliore, ma non è necessario. È possibile verificare la connessione del pin AUX nella connessione di esempio completa della libreria e aggiungere solo lo specifico numero di pin al costruttore.
E devi solamente instanziare il costruttore specifico.
// Arduino constructor
LoRa_E32 e32ttl100(2, 3); // e32 TX e32 RX
// LoRa_E32 e32ttl100(2, 3, 5); // e32 TX e32 RX, AUX If you want use AUX pin
// Wemos D1 constructor
LoRa_E32 e32ttl100(D2, D3); // e32 TX e32 RX
// LoRa_E32 e32ttl100(D2, D3, D5); // e32 TX e32 RX, AUX If you want use AUX pin
Transparent transmission
Arduino sketch:
/*
* LoRa E32-TTL-100
* Write on serial to transfer a message to other device
* https://mischianti.org
*
* E32-TTL-100----- Arduino UNO
* M0 ----- GND
* M1 ----- GND
* TX ----- PIN 2 (PullUP)
* RX ----- PIN 3 (PullUP & Voltage divider)
* AUX ----- Not connected
* VCC ----- 3.3v/5v
* GND ----- GND
*
*/
#include "Arduino.h"
#include "LoRa_E32.h"
LoRa_E32 e32ttl100(2, 3); // e32 TX e32 RX
void setup() {
Serial.begin(9600);
delay(500);
Serial.println("Hi, I'm going to send message!");
// Startup all pins and UART
e32ttl100.begin();
// Send message
ResponseStatus rs = e32ttl100.sendMessage("Hello, world?");
// Check If there is some problem of successfully send
Serial.println(rs.getResponseDescription());
}
void loop() {
// If something available
if (e32ttl100.available()>1) {
// read the String message
ResponseContainer rc = e32ttl100.receiveMessage();
// Is something goes wrong print error
if (rc.status.code!=1){
rc.status.getResponseDescription();
}else{
// Print the data received
Serial.println(rc.data);
}
}
if (Serial.available()) {
String input = Serial.readString();
e32ttl100.sendMessage(input);
}
}
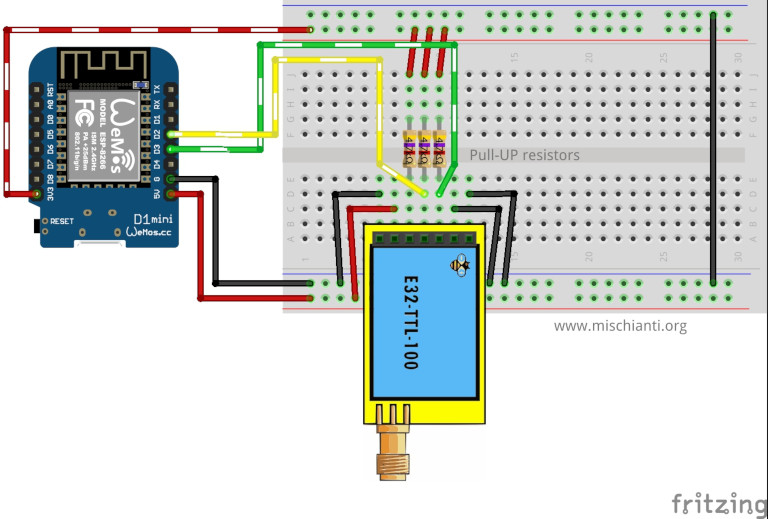
Qui lo sketch Wemos D1 (esp8266):
/*
* LoRa E32-TTL-100
* Start device or reset to send a message
* https://mischianti.org
*
* E32-TTL-100----- Wemos D1 mini
* M0 ----- GND
* M1 ----- GND
* TX ----- PIN D2 (PullUP)
* RX ----- PIN D3 (PullUP)
* AUX ----- Not connected
* VCC ----- 3.3v/5v
* GND ----- GND
*
*/
#include "Arduino.h"
#include "LoRa_E32.h"
LoRa_E32 e32ttl100(D2, D3); // e32 TX e32 RX
void setup() {
Serial.begin(9600);
delay(500);
Serial.println("Hi, I'm going to send message!");
// Startup all pins and UART
e32ttl100.begin();
// Send message
ResponseStatus rs = e32ttl100.sendMessage("Hello, world?");
// Check If there is some problem of successfully send
Serial.println(rs.getResponseDescription());
}
void loop() {
// If something available
if (e32ttl100.available()>1) {
// read the String message
ResponseContainer rc = e32ttl100.receiveMessage();
// Is something goes wrong print error
if (rc.status.code!=1){
rc.status.getResponseDescription();
}else{
// Print the data received
Serial.println(rc.data);
}
}
if (Serial.available()) {
String input = Serial.readString();
e32ttl100.sendMessage(input);
}
}
Se hai già modificato la configurazione, devi ripristinare il parametro di base:
// If you have ever change configuration you must restore It
ResponseStructContainer c;
c = e32ttl100.getConfiguration();
Configuration configuration = *(Configuration*) c.data;
Serial.println(c.status.getResponseDescription());
configuration.ADDH = 0;
configuration.ADDL = 0;
configuration.CHAN = 0x17;
configuration.OPTION.fixedTransmission = FT_TRANSPARENT_TRANSMISSION;
e32ttl100.setConfiguration(configuration, WRITE_CFG_PWR_DWN_SAVE);
Fixed transmission
Anche per la trasmissione fissa è necessario impostare M0 e M1 su LOW e per quanto riguarda la trasmissione trasparente È meglio se si collega il pin AUX per una migliore sincronizzazione.
Fixed transmission: punto a punto
Per utilizzare questo tipo di trasmissione è necessario impostare un parametro sulla configurazione e impostare un indirizzo specifico per ogni dispositivo.
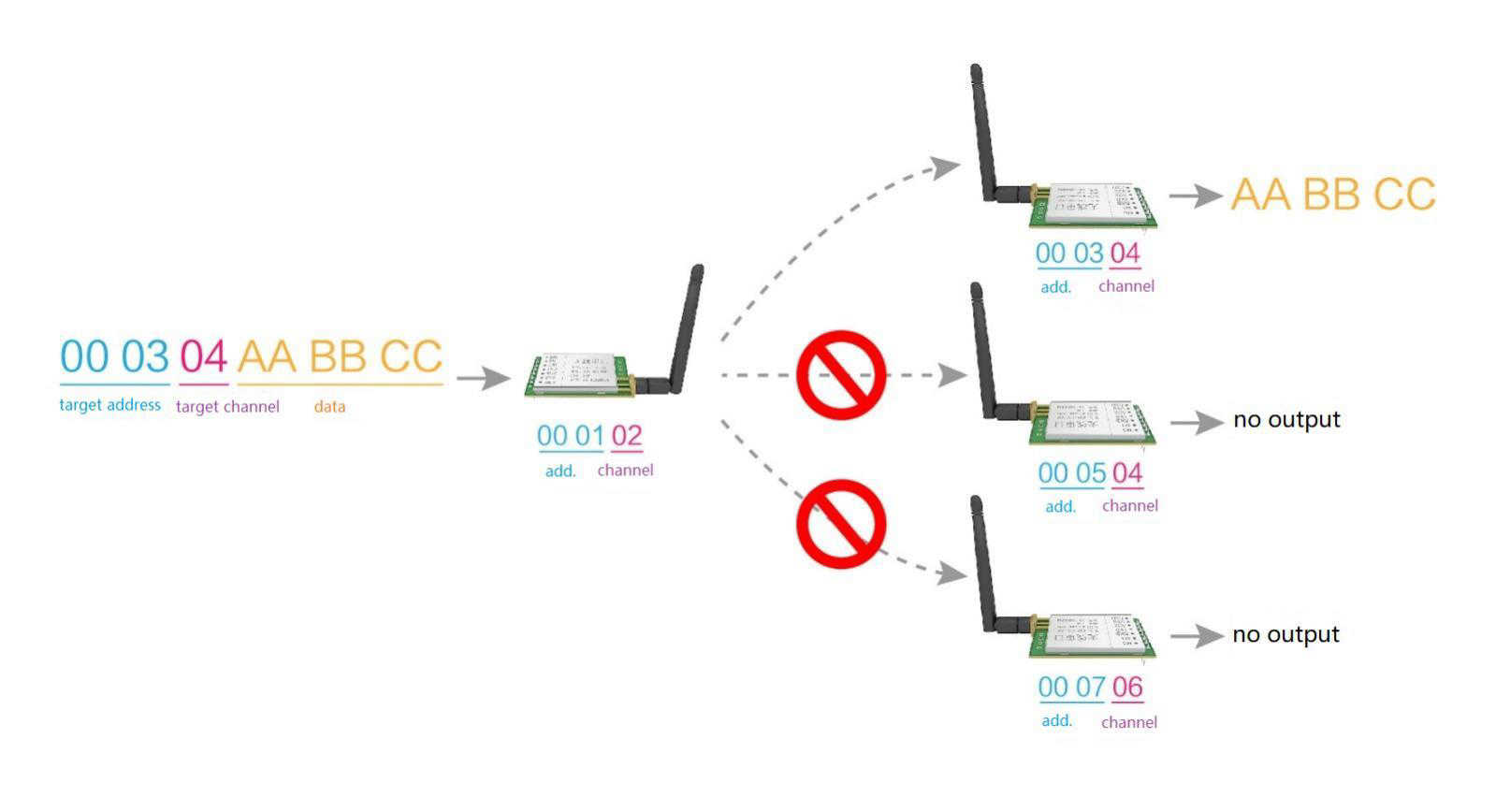
Quindi per prima cosa dobbiamo impostare i pin M0 e M1 su ALTO per entrare in modalità programma/sospensione e impostare l’indirizzo corretto e il flag di trasmissione fisso.
Se vogliamo replicare la condizione del mittente nell’immagine superiore, dobbiamo eseguire questa configurazione.
ResponseStructContainer c;
c = e32ttl.getConfiguration();
Configuration configuration = *(Configuration*) c.data;
configuration.ADDL = 0;
configuration.ADDH = 1;
configuration.CHAN = 2;
configuration.OPTION.fixedTransmission = FT_FIXED_TRANSMISSION;
e32ttl.setConfiguration(configuration, WRITE_CFG_PWR_DWN_SAVE);
Rispetto al dispositivo ricevente dobbiamo impostare questa configurazione.
ResponseStructContainer c;
c = e32ttl.getConfiguration();
Configuration configuration = *(Configuration*) c.data;
configuration.ADDL = 0;
configuration.ADDH = 3;
configuration.CHAN = 4;
configuration.OPTION.fixedTransmission = FT_FIXED_TRANSMISSION;
e32ttl.setConfiguration(configuration, WRITE_CFG_PWR_DWN_SAVE);
Ora dobbiamo inviare un messaggio al dispositivo specificato.
ResponseStatus rs = e32ttl.sendFixedMessage(0, 3, 4, "Message to 00 03 04 device");
Serial.println(rs.getResponseDescription());
Per il destinatario è più trasparente perché Indirizzo e canale sono gestiti dal dispositivo.
void loop()
{
if (e32ttl.available() > 1){
ResponseContainer rs = e32ttl.receiveMessage();
// First of all get the data
String message = rs.data;
Serial.println(rs.status.getResponseDescription());
Serial.println(message);
}
}
Se si desidera aggiungere un altro dispositivo di ricezione per eseguire un test completo, crearne uno con questa configurazione.
ResponseStructContainer c;
c = e32ttl.getConfiguration();
Configuration configuration = *(Configuration*) c.data;
configuration.ADDL = 0;
configuration.ADDH = 5;
configuration.CHAN = 4;
configuration.OPTION.fixedTransmission = FT_FIXED_TRANSMISSION;
e32ttl.setConfiguration(configuration, WRITE_CFG_PWR_DWN_SAVE);
Così puoi verificare che non siano arrivati dati.
Upload sketch (se non si collegano prima tutti i piedini, è necessario attivare la modalità programma e poi ripristinare la modalità normale):
/*
* LoRa E32-TTL-100
* Send fixed transmission message to a specified point.
* https://mischianti.org
*
* E32-TTL-100----- Arduino UNO or esp8266
* M0 ----- 3.3v (To config) GND (To send) 7 (To dinamically manage)
* M1 ----- 3.3v (To config) GND (To send) 6 (To dinamically manage)
* TX ----- PIN 2 (PullUP)
* RX ----- PIN 3 (PullUP & Voltage divider)
* AUX ----- Not connected (5 if you connect)
* VCC ----- 3.3v/5v
* GND ----- GND
*
*/
#include "Arduino.h"
#include "LoRa_E32.h"
// ---------- esp8266 pins --------------
//LoRa_E32 e32ttl(D2, D3, D5, D7, D6);
//LoRa_E32 e32ttl(D2, D3, D5, D7, D6); // Config without connect AUX and M0 M1
#include <SoftwareSerial.h>
SoftwareSerial mySerial(D2, D3);// e32 TX e32 RX
LoRa_E32 e32ttl(&mySerial, D5, D7, D6);
//#include <SoftwareSerial.h>
//SoftwareSerial mySerial(D2, D3); // e32 TX e32 RX
//LoRa_E32 e32ttl(&mySerial, D5, D7, D6);
// -------------------------------------
// ---------- Arduino pins --------------
//LoRa_E32 e32ttl(2, 3, 5, 7, 6);
//LoRa_E32 e32ttl(2, 3); // Config without connect AUX and M0 M1
//#include <SoftwareSerial.h>
//SoftwareSerial mySerial(2, 3); // e32 TX e32 RX
//LoRa_E32 e32ttl(&mySerial, 5, 7, 6);
// -------------------------------------
void printParameters(struct Configuration configuration);
void printModuleInformation(struct ModuleInformation moduleInformation);
//The setup function is called once at startup of the sketch
void setup()
{
Serial.begin(9600);
while (!Serial) {
; // wait for serial port to connect. Needed for native USB
}
delay(100);
e32ttl.begin();
// After set configuration comment set M0 and M1 to low
// and reboot if you directly set HIGH M0 and M1 to program
ResponseStructContainer c;
c = e32ttl.getConfiguration();
Configuration configuration = *(Configuration*) c.data;
configuration.ADDL = 0x01;
configuration.ADDH = 0x00;
configuration.CHAN = 0x04;
configuration.OPTION.fixedTransmission = FT_FIXED_TRANSMISSION;
e32ttl.setConfiguration(configuration, WRITE_CFG_PWR_DWN_SAVE);
printParameters(configuration);
// ---------------------------
}
// The loop function is called in an endless loop
void loop()
{
delay(2000);
Serial.println("Send message to 00 03 04");
ResponseStatus rs = e32ttl.sendFixedMessage(0, 3, 0x04, "Message to 00 03 04 device");
Serial.println(rs.getResponseDescription());
}
void printParameters(struct Configuration configuration) {
Serial.println("----------------------------------------");
Serial.print(F("HEAD : ")); Serial.print(configuration.HEAD, BIN);Serial.print(" ");Serial.print(configuration.HEAD, DEC);Serial.print(" ");Serial.println(configuration.HEAD, HEX);
Serial.println(F(" "));
Serial.print(F("AddH : ")); Serial.println(configuration.ADDH, BIN);
Serial.print(F("AddL : ")); Serial.println(configuration.ADDL, BIN);
Serial.print(F("Chan : ")); Serial.print(configuration.CHAN, DEC); Serial.print(" -> "); Serial.println(configuration.getChannelDescription());
Serial.println(F(" "));
Serial.print(F("SpeedParityBit : ")); Serial.print(configuration.SPED.uartParity, BIN);Serial.print(" -> "); Serial.println(configuration.SPED.getUARTParityDescription());
Serial.print(F("SpeedUARTDatte : ")); Serial.print(configuration.SPED.uartBaudRate, BIN);Serial.print(" -> "); Serial.println(configuration.SPED.getUARTBaudRate());
Serial.print(F("SpeedAirDataRate : ")); Serial.print(configuration.SPED.airDataRate, BIN);Serial.print(" -> "); Serial.println(configuration.SPED.getAirDataRate());
Serial.print(F("OptionTrans : ")); Serial.print(configuration.OPTION.fixedTransmission, BIN);Serial.print(" -> "); Serial.println(configuration.OPTION.getFixedTransmissionDescription());
Serial.print(F("OptionPullup : ")); Serial.print(configuration.OPTION.ioDriveMode, BIN);Serial.print(" -> "); Serial.println(configuration.OPTION.getIODroveModeDescription());
Serial.print(F("OptionWakeup : ")); Serial.print(configuration.OPTION.wirelessWakeupTime, BIN);Serial.print(" -> "); Serial.println(configuration.OPTION.getWirelessWakeUPTimeDescription());
Serial.print(F("OptionFEC : ")); Serial.print(configuration.OPTION.fec, BIN);Serial.print(" -> "); Serial.println(configuration.OPTION.getFECDescription());
Serial.print(F("OptionPower : ")); Serial.print(configuration.OPTION.transmissionPower, BIN);Serial.print(" -> "); Serial.println(configuration.OPTION.getTransmissionPowerDescription());
Serial.println("----------------------------------------");
}
void printModuleInformation(struct ModuleInformation moduleInformation) {
Serial.println("----------------------------------------");
Serial.print(F("HEAD BIN: ")); Serial.print(moduleInformation.HEAD, BIN);Serial.print(" ");Serial.print(moduleInformation.HEAD, DEC);Serial.print(" ");Serial.println(moduleInformation.HEAD, HEX);
Serial.print(F("Freq.: ")); Serial.println(moduleInformation.frequency, HEX);
Serial.print(F("Version : ")); Serial.println(moduleInformation.version, HEX);
Serial.print(F("Features : ")); Serial.println(moduleInformation.features, HEX);
Serial.println("----------------------------------------");
}
Codice del ricevente (se non si collegano prima tutti i piedini, è necessario attivare la modalità programma e poi ripristinare la modalità normale):
/*
* LoRa E32-TTL-100
* Receive fixed transmission message as a specified point.
* https://mischianti.org
*
* E32-TTL-100----- Arduino UNO or esp8266
* M0 ----- 3.3v (To config) GND (To send) 7 (To dinamically manage)
* M1 ----- 3.3v (To config) GND (To send) 6 (To dinamically manage)
* TX ----- PIN 2 (PullUP)
* RX ----- PIN 3 (PullUP & Voltage divider)
* AUX ----- Not connected (5 if you connect)
* VCC ----- 3.3v/5v
* GND ----- GND
*
*/
#include "Arduino.h"
#include "LoRa_E32.h"
// ---------- esp8266 pins --------------
//LoRa_E32 e32ttl(D2, D3, D5, D7, D6);
//LoRa_E32 e32ttl(D2, D3); // Config without connect AUX and M0 M1
//#include <SoftwareSerial.h>
//SoftwareSerial mySerial(D2, D3);// e32 TX e32 RX
//LoRa_E32 e32ttl(&mySerial, D5, D7, D6);
// -------------------------------------
// ---------- Arduino pins --------------
//LoRa_E32 e32ttl(2, 3, 5, 7, 6);
LoRa_E32 e32ttl(2, 3); // Config without connect AUX and M0 M1
//#include <SoftwareSerial.h>
//SoftwareSerial mySerial(2, 3); // e32 TX e32 RX
//LoRa_E32 e32ttl(&mySerial, 5, 7, 6);
// -------------------------------------
void printParameters(struct Configuration configuration);
void printModuleInformation(struct ModuleInformation moduleInformation);
//The setup function is called once at startup of the sketch
void setup()
{
Serial.begin(9600);
while (!Serial) {
; // wait for serial port to connect. Needed for native USB
}
delay(100);
e32ttl.begin();
// e32ttl.resetModule();
// After set configuration comment set M0 and M1 to low
// and reboot if you directly set HIGH M0 and M1 to program
ResponseStructContainer c;
c = e32ttl.getConfiguration();
Configuration configuration = *(Configuration*) c.data;
configuration.ADDL = 0x03;
configuration.ADDH = 0x00;
configuration.CHAN = 0x04;
configuration.OPTION.fixedTransmission = FT_FIXED_TRANSMISSION;
e32ttl.setConfiguration(configuration, WRITE_CFG_PWR_DWN_SAVE);
printParameters(configuration);
// ---------------------------
Serial.println();
Serial.println("Start listening!");
}
// The loop function is called in an endless loop
void loop()
{
if (e32ttl.available() > 1){
ResponseContainer rs = e32ttl.receiveMessage();
// First of all get the data
String message = rs.data;
Serial.println(rs.status.getResponseDescription());
Serial.println(message);
}
}
void printParameters(struct Configuration configuration) {
Serial.println("----------------------------------------");
Serial.print(F("HEAD : ")); Serial.print(configuration.HEAD, BIN);Serial.print(" ");Serial.print(configuration.HEAD, DEC);Serial.print(" ");Serial.println(configuration.HEAD, HEX);
Serial.println(F(" "));
Serial.print(F("AddH : ")); Serial.println(configuration.ADDH, DEC);
Serial.print(F("AddL : ")); Serial.println(configuration.ADDL, DEC);
Serial.print(F("Chan : ")); Serial.print(configuration.CHAN, DEC); Serial.print(" -> "); Serial.println(configuration.getChannelDescription());
Serial.println(F(" "));
Serial.print(F("SpeedParityBit : ")); Serial.print(configuration.SPED.uartParity, BIN);Serial.print(" -> "); Serial.println(configuration.SPED.getUARTParityDescription());
Serial.print(F("SpeedUARTDatte : ")); Serial.print(configuration.SPED.uartBaudRate, BIN);Serial.print(" -> "); Serial.println(configuration.SPED.getUARTBaudRate());
Serial.print(F("SpeedAirDataRate : ")); Serial.print(configuration.SPED.airDataRate, BIN);Serial.print(" -> "); Serial.println(configuration.SPED.getAirDataRate());
Serial.print(F("OptionTrans : ")); Serial.print(configuration.OPTION.fixedTransmission, BIN);Serial.print(" -> "); Serial.println(configuration.OPTION.getFixedTransmissionDescription());
Serial.print(F("OptionPullup : ")); Serial.print(configuration.OPTION.ioDriveMode, BIN);Serial.print(" -> "); Serial.println(configuration.OPTION.getIODroveModeDescription());
Serial.print(F("OptionWakeup : ")); Serial.print(configuration.OPTION.wirelessWakeupTime, BIN);Serial.print(" -> "); Serial.println(configuration.OPTION.getWirelessWakeUPTimeDescription());
Serial.print(F("OptionFEC : ")); Serial.print(configuration.OPTION.fec, BIN);Serial.print(" -> "); Serial.println(configuration.OPTION.getFECDescription());
Serial.print(F("OptionPower : ")); Serial.print(configuration.OPTION.transmissionPower, BIN);Serial.print(" -> "); Serial.println(configuration.OPTION.getTransmissionPowerDescription());
Serial.println("----------------------------------------");
}
void printModuleInformation(struct ModuleInformation moduleInformation) {
Serial.println("----------------------------------------");
Serial.print(F("HEAD BIN: ")); Serial.print(moduleInformation.HEAD, BIN);Serial.print(" ");Serial.print(moduleInformation.HEAD, DEC);Serial.print(" ");Serial.println(moduleInformation.HEAD, HEX);
Serial.print(F("Freq.: ")); Serial.println(moduleInformation.frequency, HEX);
Serial.print(F("Version : ")); Serial.println(moduleInformation.version, HEX);
Serial.print(F("Features : ")); Serial.println(moduleInformation.features, HEX);
Serial.println("----------------------------------------");
}
Se cambi indirizzo o canale nello sketch del destinatario, non ricevi più messaggi.
Fixed transmisison: broadcast
Con la stessa configurazione di indirizzo e canale possiamo testare la comunicazione broadcast.
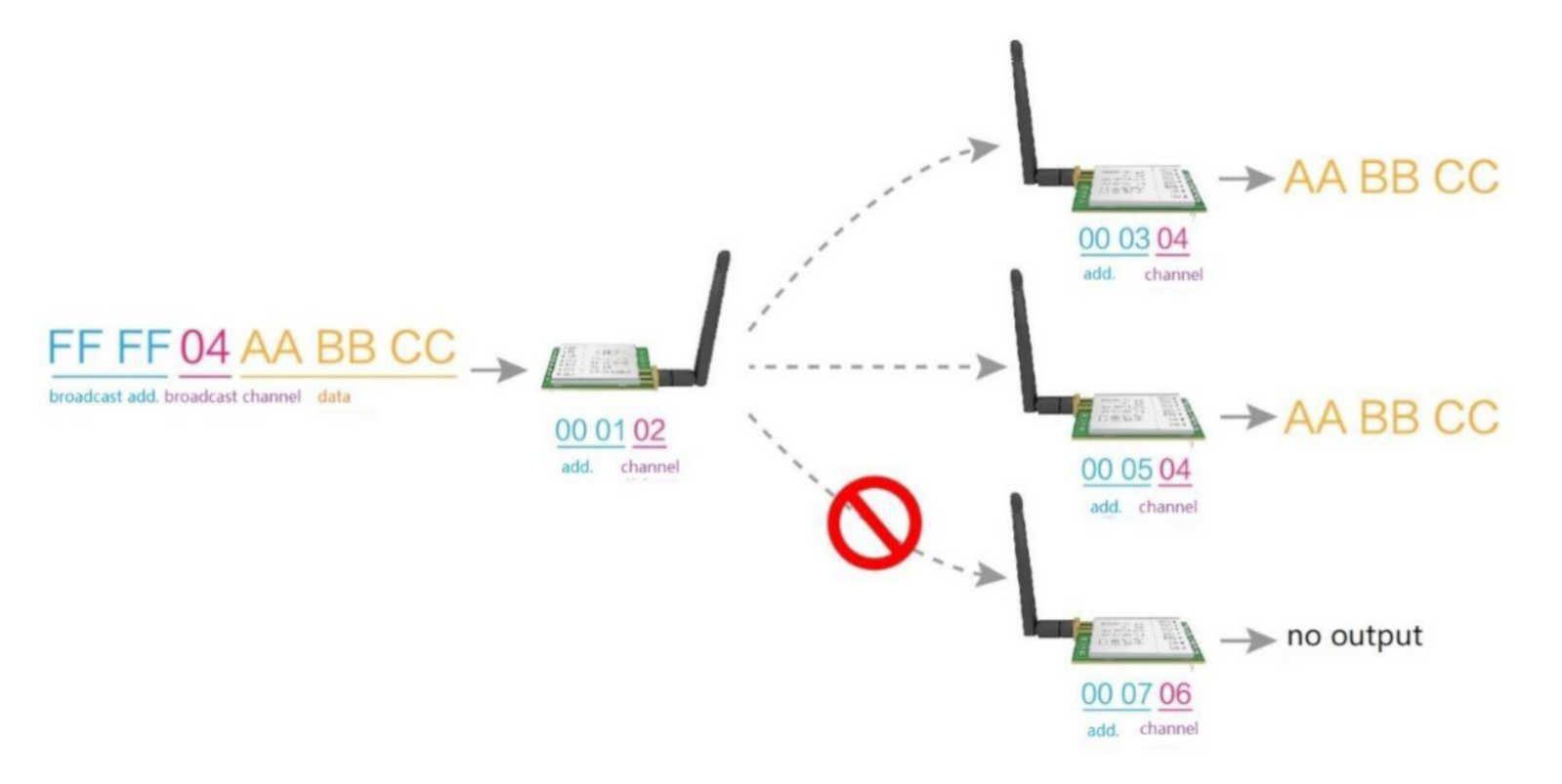
Con la mia libreria è possibile utilizzare due tipi di metodo di trasmissione.
ResponseStatus rs = e32ttl.sendBroadcastFixedMessage(4, "Send message to channel 4");
Serial.println(rs.getResponseDescription());
o
ResponseStatus rs = e32ttl.sendFixedMessage(BROADCAST_ADDRESS, BROADCAST_ADDRESS, 4, "Send message to channel 4");
Serial.println(rs.getResponseDescription());
Il ricevitore come descritto ha lo stesso codice perché il preambolo con Indirizzo e canale è gestito dal dispositivo.
Ecco lo sketch del mittente (se non si collegano prima tutti i piedini, è necessario attivare la modalità programma e poi ripristinare la modalità normale) :
/*
* LoRa E32-TTL-100
* Send fixed broadcast transmission message to a specified channel.
* https://mischianti.org
*
* E32-TTL-100----- Arduino UNO or esp8266
* M0 ----- 3.3v (To config) GND (To send) 7 (To dinamically manage)
* M1 ----- 3.3v (To config) GND (To send) 6 (To dinamically manage)
* TX ----- PIN 2 (PullUP)
* RX ----- PIN 3 (PullUP & Voltage divider)
* AUX ----- Not connected (5 if you connect)
* VCC ----- 3.3v/5v
* GND ----- GND
*
*/
#include "Arduino.h"
#include "LoRa_E32.h"
// ---------- esp8266 pins --------------
//LoRa_E32 e32ttl(D2, D3, D5, D7, D6);
//LoRa_E32 e32ttl(D2, D3, D5, D7, D6); // Config without connect AUX and M0 M1
#include <SoftwareSerial.h>
SoftwareSerial mySerial(D2, D3); // e32 TX e32 RX
LoRa_E32 e32ttl(&mySerial, D5, D7, D6);
//#include <SoftwareSerial.h>
//SoftwareSerial mySerial(D2, D3); // e32 TX e32 RX
//LoRa_E32 e32ttl(&mySerial, D5, D7, D6);
// -------------------------------------
// ---------- Arduino pins --------------
//LoRa_E32 e32ttl(2, 3, 5, 7, 6);
//LoRa_E32 e32ttl(2, 3); // Config without connect AUX and M0 M1
//#include <SoftwareSerial.h>
//SoftwareSerial mySerial(2, 3); // e32 TX e32 RX
//LoRa_E32 e32ttl(&mySerial, 5, 7, 6);
// -------------------------------------
void printParameters(struct Configuration configuration);
void printModuleInformation(struct ModuleInformation moduleInformation);
//The setup function is called once at startup of the sketch
void setup()
{
Serial.begin(9600);
while (!Serial) {
; // wait for serial port to connect. Needed for native USB
}
delay(100);
e32ttl.begin();
// After set configuration comment set M0 and M1 to low
// and reboot if you directly set HIGH M0 and M1 to program
ResponseStructContainer c;
c = e32ttl.getConfiguration();
Configuration configuration = *(Configuration*) c.data;
configuration.ADDL = 0x01;
configuration.ADDH = 0x00;
configuration.CHAN = 0x04;
configuration.OPTION.fixedTransmission = FT_FIXED_TRANSMISSION;
e32ttl.setConfiguration(configuration, WRITE_CFG_PWR_DWN_SAVE);
printParameters(configuration);
// ---------------------------
}
// The loop function is called in an endless loop
void loop()
{
delay(2000);
Serial.println("Broadcast message to channel 04");
ResponseStatus rs = e32ttl.sendBroadcastFixedMessage(0x04, "Broadcast message to channel 04");
Serial.println(rs.getResponseDescription());
}
void printParameters(struct Configuration configuration) {
Serial.println("----------------------------------------");
Serial.print(F("HEAD : ")); Serial.print(configuration.HEAD, BIN);Serial.print(" ");Serial.print(configuration.HEAD, DEC);Serial.print(" ");Serial.println(configuration.HEAD, HEX);
Serial.println(F(" "));
Serial.print(F("AddH : ")); Serial.println(configuration.ADDH, BIN);
Serial.print(F("AddL : ")); Serial.println(configuration.ADDL, BIN);
Serial.print(F("Chan : ")); Serial.print(configuration.CHAN, DEC); Serial.print(" -> "); Serial.println(configuration.getChannelDescription());
Serial.println(F(" "));
Serial.print(F("SpeedParityBit : ")); Serial.print(configuration.SPED.uartParity, BIN);Serial.print(" -> "); Serial.println(configuration.SPED.getUARTParityDescription());
Serial.print(F("SpeedUARTDatte : ")); Serial.print(configuration.SPED.uartBaudRate, BIN);Serial.print(" -> "); Serial.println(configuration.SPED.getUARTBaudRate());
Serial.print(F("SpeedAirDataRate : ")); Serial.print(configuration.SPED.airDataRate, BIN);Serial.print(" -> "); Serial.println(configuration.SPED.getAirDataRate());
Serial.print(F("OptionTrans : ")); Serial.print(configuration.OPTION.fixedTransmission, BIN);Serial.print(" -> "); Serial.println(configuration.OPTION.getFixedTransmissionDescription());
Serial.print(F("OptionPullup : ")); Serial.print(configuration.OPTION.ioDriveMode, BIN);Serial.print(" -> "); Serial.println(configuration.OPTION.getIODroveModeDescription());
Serial.print(F("OptionWakeup : ")); Serial.print(configuration.OPTION.wirelessWakeupTime, BIN);Serial.print(" -> "); Serial.println(configuration.OPTION.getWirelessWakeUPTimeDescription());
Serial.print(F("OptionFEC : ")); Serial.print(configuration.OPTION.fec, BIN);Serial.print(" -> "); Serial.println(configuration.OPTION.getFECDescription());
Serial.print(F("OptionPower : ")); Serial.print(configuration.OPTION.transmissionPower, BIN);Serial.print(" -> "); Serial.println(configuration.OPTION.getTransmissionPowerDescription());
Serial.println("----------------------------------------");
}
void printModuleInformation(struct ModuleInformation moduleInformation) {
Serial.println("----------------------------------------");
Serial.print(F("HEAD BIN: ")); Serial.print(moduleInformation.HEAD, BIN);Serial.print(" ");Serial.print(moduleInformation.HEAD, DEC);Serial.print(" ");Serial.println(moduleInformation.HEAD, HEX);
Serial.print(F("Freq.: ")); Serial.println(moduleInformation.frequency, HEX);
Serial.print(F("Version : ")); Serial.println(moduleInformation.version, HEX);
Serial.print(F("Features : ")); Serial.println(moduleInformation.features, HEX);
Serial.println("----------------------------------------");
}
Fixed transmission: monitoraggio
Come hai già visto sul primo schema puoi ricevere tutti i messaggi del canale specificato, devi configurare il tuo indirizzo in questo modo.
ResponseStructContainer c;
c = e32ttl.getConfiguration();
Configuration configuration = *(Configuration*) c.data;
configuration.ADDL = BROADCAST_ADDRESS;
configuration.ADDH = BROADCAST_ADDRESS;
configuration.OPTION.fixedTransmission = FT_FIXED_TRANSMISSION;
e32ttl.setConfiguration(configuration, WRITE_CFG_PWR_DWN_SAVE);
Ed il dispositivo ricevente sarà (se non si collegano prima tutti i piedini, è necessario attivare la modalità programma e poi ripristinare la modalità normale):
/*
* LoRa E32-TTL-100
* Receive fixed transmission message on channel.
* https://mischianti.org
*
* E32-TTL-100----- Arduino UNO or esp8266
* M0 ----- 3.3v (To config) GND (To send) 7 (To dinamically manage)
* M1 ----- 3.3v (To config) GND (To send) 6 (To dinamically manage)
* TX ----- PIN 2 (PullUP)
* RX ----- PIN 3 (PullUP & Voltage divider)
* AUX ----- Not connected (5 if you connect)
* VCC ----- 3.3v/5v
* GND ----- GND
*
*/
#include "Arduino.h"
#include "LoRa_E32.h"
// ---------- esp8266 pins --------------
//LoRa_E32 e32ttl(D2, D3, D5, D7, D6);
//LoRa_E32 e32ttl(D2, D3); // Config without connect AUX and M0 M1
//#include <SoftwareSerial.h>
//SoftwareSerial mySerial(D2, D3); // e32 TX e32 RX
//LoRa_E32 e32ttl(&mySerial, D5, D7, D6);
// -------------------------------------
// ---------- Arduino pins --------------
//LoRa_E32 e32ttl(2, 3, 5, 7, 6);
LoRa_E32 e32ttl(2, 3); // Config without connect AUX and M0 M1
//#include <SoftwareSerial.h>
//SoftwareSerial mySerial(2, 3); // e32 TX e32 RX
//LoRa_E32 e32ttl(&mySerial, 5, 7, 6);
// -------------------------------------
void printParameters(struct Configuration configuration);
void printModuleInformation(struct ModuleInformation moduleInformation);
//The setup function is called once at startup of the sketch
void setup()
{
Serial.begin(9600);
while (!Serial) {
; // wait for serial port to connect. Needed for native USB
}
delay(100);
e32ttl.begin();
// e32ttl.resetModule();
// After set configuration comment set M0 and M1 to low
// and reboot if you directly set HIGH M0 and M1 to program
ResponseStructContainer c;
c = e32ttl.getConfiguration();
Configuration configuration = *(Configuration*) c.data;
configuration.ADDL = BROADCAST_ADDRESS;
configuration.ADDH = BROADCAST_ADDRESS;
configuration.CHAN = 0x04;
configuration.OPTION.fixedTransmission = FT_FIXED_TRANSMISSION;
e32ttl.setConfiguration(configuration, WRITE_CFG_PWR_DWN_SAVE);
printParameters(configuration);
// ---------------------------
Serial.println();
Serial.println("Start listening!");
}
// The loop function is called in an endless loop
void loop()
{
if (e32ttl.available() > 1){
ResponseContainer rs = e32ttl.receiveMessage();
// First of all get the data
String message = rs.data;
Serial.println(rs.status.getResponseDescription());
Serial.println(message);
}
}
void printParameters(struct Configuration configuration) {
Serial.println("----------------------------------------");
Serial.print(F("HEAD : ")); Serial.print(configuration.HEAD, BIN);Serial.print(" ");Serial.print(configuration.HEAD, DEC);Serial.print(" ");Serial.println(configuration.HEAD, HEX);
Serial.println(F(" "));
Serial.print(F("AddH : ")); Serial.println(configuration.ADDH, DEC);
Serial.print(F("AddL : ")); Serial.println(configuration.ADDL, DEC);
Serial.print(F("Chan : ")); Serial.print(configuration.CHAN, DEC); Serial.print(" -> "); Serial.println(configuration.getChannelDescription());
Serial.println(F(" "));
Serial.print(F("SpeedParityBit : ")); Serial.print(configuration.SPED.uartParity, BIN);Serial.print(" -> "); Serial.println(configuration.SPED.getUARTParityDescription());
Serial.print(F("SpeedUARTDatte : ")); Serial.print(configuration.SPED.uartBaudRate, BIN);Serial.print(" -> "); Serial.println(configuration.SPED.getUARTBaudRate());
Serial.print(F("SpeedAirDataRate : ")); Serial.print(configuration.SPED.airDataRate, BIN);Serial.print(" -> "); Serial.println(configuration.SPED.getAirDataRate());
Serial.print(F("OptionTrans : ")); Serial.print(configuration.OPTION.fixedTransmission, BIN);Serial.print(" -> "); Serial.println(configuration.OPTION.getFixedTransmissionDescription());
Serial.print(F("OptionPullup : ")); Serial.print(configuration.OPTION.ioDriveMode, BIN);Serial.print(" -> "); Serial.println(configuration.OPTION.getIODroveModeDescription());
Serial.print(F("OptionWakeup : ")); Serial.print(configuration.OPTION.wirelessWakeupTime, BIN);Serial.print(" -> "); Serial.println(configuration.OPTION.getWirelessWakeUPTimeDescription());
Serial.print(F("OptionFEC : ")); Serial.print(configuration.OPTION.fec, BIN);Serial.print(" -> "); Serial.println(configuration.OPTION.getFECDescription());
Serial.print(F("OptionPower : ")); Serial.print(configuration.OPTION.transmissionPower, BIN);Serial.print(" -> "); Serial.println(configuration.OPTION.getTransmissionPowerDescription());
Serial.println("----------------------------------------");
}
void printModuleInformation(struct ModuleInformation moduleInformation) {
Serial.println("----------------------------------------");
Serial.print(F("HEAD BIN: ")); Serial.print(moduleInformation.HEAD, BIN);Serial.print(" ");Serial.print(moduleInformation.HEAD, DEC);Serial.print(" ");Serial.println(moduleInformation.HEAD, HEX);
Serial.print(F("Freq.: ")); Serial.println(moduleInformation.frequency, HEX);
Serial.print(F("Version : ")); Serial.println(moduleInformation.version, HEX);
Serial.print(F("Features : ")); Serial.println(moduleInformation.features, HEX);
Serial.println("----------------------------------------");
}
Grazie
- LoRa E32 per Arduino, esp32 o esp8266: specifiche ed utilizzo base
- LoRa E32 per Arduino, esp32 o esp8266: libreria
- LoRa E32 per Arduino, esp32 o esp8266: configurazione
- LoRa E32 per Arduino, esp32 o esp8266: trasmissione fissa
- LoRa E32 per Arduino, esp32 o esp8266: power saving ed invio di dati strutturati
- LoRa E32 per Arduino, esp32 o esp8266: WOR (wake on radio) il microcontrollore e lo shield per Arduino
- LoRa E32 per Arduino, esp32 o esp8266: WOR (wake on radio) il microcontrollore e lo shield per il WeMos D1 mini
- LoRa E32 per Arduino, esp32 o esp8266 : WOR (wake on radio) del microcontrollore e lo shield per esp32
- LoRa E32 per STM32: WOR (wake on radio) del microcontrollore e lo shield per STM32
- Mischianti Arduino LoRa shield (Open source)
- Mischianti WeMos LoRa shield (Open source)
- Mischianti ESP32 DOIT DEV KIT v1 LoRa shield (Open source)










